「超電導リニア中央新幹線」の開発に関する講演会に行ってきました。超電導リニアにはすごい技術が隠されていることがわかったので紹介します。この講演会は、公益社団法人日本電気技術者協会中部支部の創立60周年の記念講演会です。
講師は、東海旅客鉄道株式会社リニア開発本部・担当部長の北野淳一さんです。北野さんは、1962年から開発の始まった宮崎のリニア実験線の時代から、現在の山梨実験線まで超電導リニア一筋、研究・開発に携わった方で、大変わかりやすい説明をしてくれました。
超電導リニア
超電導リニアは、超電導を利用した世界に誇る日本独自の先端技術です。従来の鉄道のように車輪とレールの摩擦を利用して走行するのではなく、車両に搭載した超電導磁石と地上に取り付けられたコイルとの間の磁力によって非接触で走行します。そのため、時速500kmという超高速走行が可能となります。
1962年に全く新しい輸送システムである浮上式鉄道の研究がスタートし、1997年4月には山梨リニア実験線で走行試験が始まりました。超電導リニアの技術レベルは、各段階で評価されていて、すでに営業運転に支障のないレベルに達しています。
2011年12月には、超電導リニアに関する技術基準が国土交通大臣により制定されました。2013年8月には、山梨リニア実験線の全面的な設備更新と42.8kmの延伸工事が完了し、L0(エル・ゼロ)系車両による走行試験が開始されました。
2027年の品川・名古屋間の営業運転に向けて、更なる安全性と省エネ技術の確立を目指して改良がすすめられています。
超電導リニアの原理
超電導とは
ある種の金属・合金・酸化物を一定温度以下にしたとき、電気抵抗がゼロになる現象を超電導現象といいます。超電導状態になったコイル(超電導コイル)に一度電流を流すと、電流は半永久的に流れ続けます。超電導リニアでは、超電導材料としてニオブチタン合金を使用し、液体ヘリウムでマイナス269℃に冷却することにより超電導状態を作り出しています。
現在は液体ヘリウム(―269℃)を使用する低温超電導(4K(ケルビン))が利用されているが、より効率の良い液体窒素(-253℃)が利用できる高温超電導(20K(ケルビン))も研究しており、2027年の開業までに高温超電導技術が開発ができれば営業車で活用される可能性もあるとのことです。
リニアモーターとは
リニアモーターとは、従来の鉄道モーターを直線状に引き伸ばしたものです。このモーターの内側の回転子が車両に取り付けられる超電導磁石、外側の固定子が地上のガイドウェイ(軌道)に設置される推進コイルに相当します。
交流の三相(UVW)のコイル間隔は90cmを採用しているので一周期で2.7mとなり、線路の長さは必ず2.7mの倍数となるように設計されています。新幹線の中間車の長さは25mですが、超電導リニアの中間車の長さは2.7mの9倍の24.3mで設計されているそうです。鉄道の軌間(在来線)が狭軌で1,067mm、標準軌(新幹線)で1,435mmにあたるものが、超電導リニアでは三相コイル1周期分間隔の長さ2,700mmになるんです。
どうやって走行するのか
超電導リニアは、車両に搭載した超電導磁石と地上のガイドウェイ(軌道)に設置されたコイルとの間の磁力によって、車両を10cm程度浮上させ、超高速で走行します。超電導リニアは、同期電動機の原理で走行しています。
東京・名古屋間には10か所の変電所が計画されていて、ガイドウェイ(軌道)に設置されたコイルに超電導リニアの走行に必要な制御をしながら電気を送ります。新幹線と異なり、走行にかかわるすべての制御が、変電所側からできるのが大きな特徴です。日本では交流の周波数が東西で50Hzと60Hzで異なりますが、リニア中央新幹線では60Hzを採用しているそうです。
推進の原理
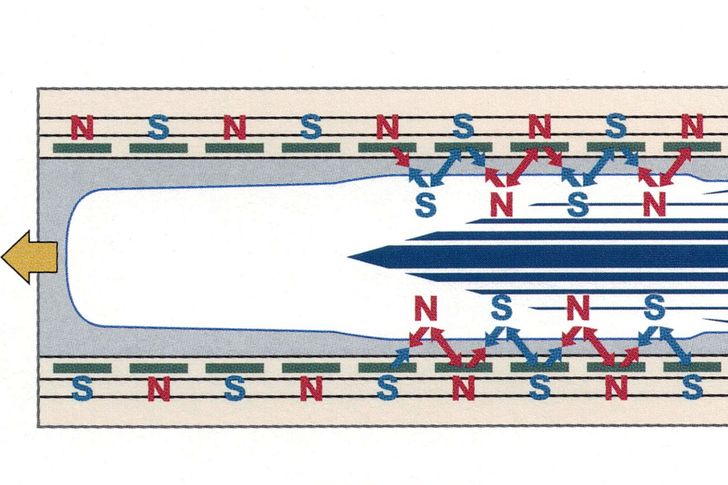
ガイドウェイの推進コイルに電流を流すことにより磁界(N極・S極)が発生し、車両の超電導磁石(N極・S極を交互に配置)との間で、引き合う力と反発する力が発生します。これを利用して車両(超電導磁石)が前進します。
超電導リニアは低速走行時、原理上浮上力が弱いので、車輪走行となります。車輪が取り付けられている台車には、超電導電磁石とその冷却システム、補助支持車輪・案内車輪がパッケージ化されています。台車と車両本体との間はエア・サスペンションで支持されています。走行用車輪には飛行機の車輪技術が使われているとのことです。
浮上の原理
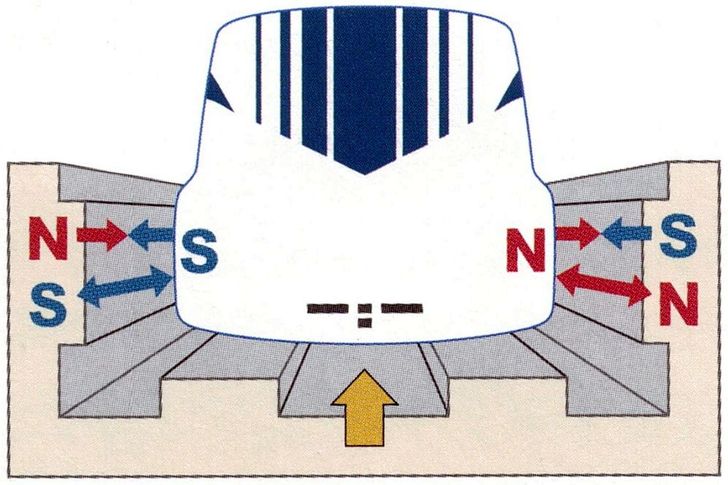
ガイドウェイの側壁両側に浮上・案内コイルが設置されていて、車両の超電導磁石が高速で通過すると両側の浮上・案内コイルに電流が流れて電磁石となり、車両(超電導磁石)を押し上げる力(反発力)と引き上げる力(吸引力)が発生します。
三相コイルの1相分には、上下方向で8の字になるように巻かれたコイルが2組入った「浮上・案内コイル」(JR東海では、形状から田型コイルと呼んでいるらしい。)が、ガイドウェイの側壁両側に設置されています。両側壁の三相コイルの1相分のコイルは、「ヌル・フラックスケーブル」となるように、お互いに接続されています。
外部電源を必要とせず、超電導磁石の通過で起電力が発生し車両が浮上すると同時に、車両が常に軌道の中心を通過するように磁気的に制御されるところが、すばらしいアイデアです。
Null-Fluxとは「零磁束」を意味し、二つのコイルに鎖交する磁束の差が自動的に零になるような方向に磁界の供給側を作用させる方式で、JRでは浮上と案内に用いられています。
案内の原理
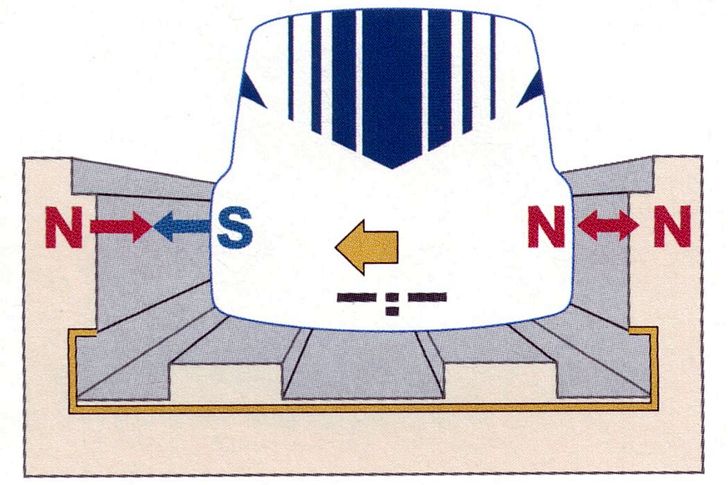
ガイドウェイの側壁両側に設置された浮上・案内コイルは、車両が中心からどちらか一方にずれると、車両の遠ざかった側に吸引力、近づいた側に反発力が働き、車両を常に中央に戻します。
「浮上・案内コイル」により超電導リニアは、ちょうど船が海に浮かぶように、磁気の海に浮かんでいる感じになります。超電導リニアが曲線を通過するとき、車両に遠心力が働き外側に移動しますが、「浮上・案内コイル」により車両を内側に戻る力と同時に車体の外側を持ち上げる力も働きます。
軌道に傾斜をつけることなく、曲線を曲がりやすくする力が自動的に作用するという方式には感動しました。
超電導リニアの夜明け
1962年、東京~大阪間1時間を目指し、新幹線の次の超高速鉄道としてリニアモーター推進浮上式鉄道の研究がスタートしました。1972年に国鉄・鉄道技術研究所(現在は(財)鉄道総合技術研究所)内で初めてML100が浮上走行に成功しました。1977年には宮崎に実験線が建設され、1979年に最初の実験車両ML500において当時の鉄道の最高速度517km/hを記録しました。
1980年にガイドウェイは逆T字型からU字型に改造され、有人走行可能な車両(MLU001,MLU002N)により実験が続けられました。宮崎実験線では、超電導浮上式鉄道の基本的な性能について実験が行われましたが、単線でトンネルや充分な勾配、曲線がないことから、これらを備えた新たな実験線が必要になり、1989年、山梨リニア実験線が建設されることになりました。
山梨リニア実験線の誕生
山梨リニア実験線は富士山の北側に位置する全長24.8kmの路線です。
1990年11月に着手式が行われ、山梨リニア実験線がスタートしました。1995年7月には試験車両MLX01が完成して山梨リニア実験線に搬入されました。その後も様々な設備工事が行われ、1997年3月、先行の18.4kmが完成しました。
技術上のめどが立つ
1997年4月3日、低速度での車両走行にて走行試験がスタートしました。5月には、浮上走行に成功し、安定した浮上走行ができることが確認されました。その後、速度向上試験が実施され、11月には500km/hを突破しました。12月には設計最高速度である550km/hを記録し、試験開始から約9か月で開発目標に到達しました。
1999年2月には長大編成による走行安定性などを確認するために、5両編成での走行試験をが実施されました。また、対向列車とのすれ違い時における走行安定性などを確認するために、高速すれ違い試験が実施されました。1999年11月には相対速度1,003km/hを記録しました。その他、駅での先行列車の退避、後続列車の追い越し、続行運転などを想定した複数列車による試験が実施され、スムーズな運行ができることが確認されました。
2000年3月、運輸省(現在の国土交通省)・超電導磁気浮上式鉄道実用技術評価委員会において、「超高速大量輸送システムとして、実用化に向けた技術上のめどが立ったものと考えられる。」との評価を受けました。
実用化基盤技術の確立
実用化基盤技術の確立を目指し
1.信頼性・長期耐久性の検証
2.コスト低減
3.車両の空力的特性の改善
を柱として技術開発および走行試験が推進されました。信頼性・長期耐久性の検証やコスト低減の検討を進めるとともに、空力的特性や乗り心地などを多角的に把握・検証する目的で、先頭形状、車両断面、車両構造において多くの試験的要素を取り入れた試験車両(MXL01-901)が投入されました。2002年7月に走行試験を開始し、車両運動・走行抵抗の低減効果、車両・沿線環境の改善効果などが確認されました。
また、2003年からは、将来の営業線設備の最適設計を行うために、より高いレベルの安全性・信頼性・耐久性を確認するための試験が実施されました。2003年11月、連続走行試験が実施され、これまでの記録を2倍以上上回る2,876km(実験線先行区間89往復)を走行しました。これはJR東海保有の新幹線車両の1日平均運行距離1,400kmの約2倍に相当する距離です。
また、2003年12月には、これまでの自らがもつ世界最高記録を焼く30km/h上回る581km/hを記録しました。
さらには、1999年11月以来の高速すれ違い試験を行い、2004年11月に、これまでの記録を上回るすれ違い相対速度1,026km/hを記録しました。
営業線に必要な技術の整備
超高速大量輸送システムとしての実用化技術をかつ立することを目指し
1.更なる長期耐久性の検証
2.メンテナンスを含めた更なるコスト低減のための技術開発
3.営業線適用に向けた設備仕様の検討
を柱に技術開発、走行試験を推進しました。また、2003年4月からは、これまでの車両を営業線に近い形状へ改良して走行試験が実施されました。先頭部の長さが短縮され、車体上部両側を円形から角形に改良されました。2010年にはその実証データを基にL0(エル・ゼロ)系の概要が決定され、制作に着手しました。2011年9月には。実用技術評価委員会において、誘導集電装置が「車上電源として実用化に必要な技術が確立している」との評価を受けました。さらに、同年12月には、超電導リニアに関する技術基準が国土交通大臣により制定されました。
「浮上・案内コイル」の位置が、軌道上からガイドウェイの側壁両側に変更されてから、車両内の照明や空調などに利用する電気を外部から取り込むのが困難になったことから、車両にバッテリーやディーゼルエンジンを搭載した時期もあったのですが、ガイドウェイ側壁からも効率よく誘導集電する方法が確立されたので、すべての電源を外部から供給できるようになったとのことです。また、ガイドウェイ側壁はコンクリート製ですが、中の鉄筋は低磁性や非磁性の物を使用しているそうです。
2009年7月、国土交通省の超電導磁気浮上式鉄道実用技術評価委員会委において、超電導磁気浮上鉄道について「営業線に必要となる技術が網羅的、体系的に整備され、今後詳細な営業線仕様及び技術基準等の策定を具体的に進めることが可能となった。」との評価を受けました。
設備更新・延伸後の山梨リニア実験線
山梨リニア実験線では、設備の全面的な更新と42.8kmへの延伸工事を完了し、現在L0(エル・ゼロ)系車両による走行試験を行っています。2015年4月には、長距離走行試験実施し、1日の走行距離が4,064kmに到達したほか、高速走行試験により時速603kmを記録し、鉄道の世界最高速度を更新しました。この記録は鉄道の世界最高速度として、ギネス世界記録に認定されました。中央新幹線の開業に向け、さらなる超電導技術のブラシュアップと建設、運営、保守のコストダウンに引き続き取り組んでいます。
1両は4列シートで68人乗り、16編成時で1,000人の定員となる予定です。車両断面は幅2.9m、高さ3.1mの角形です。
リニア中央新幹線の開業予定
2016年1月に東京・品川駅で建設の起工式がありました。リニア中央新幹線の東京(品川)・名古屋間の開通は2027年の予定で、東京(品川)・名古屋間を40分で結びます。また、その後も大阪まで延伸し、東京(品川)・大阪間を67分で結ぶ予定です。
東京(品川)・名古屋間の開業時は1時間に5本走行させ、1日の合計走行距離は27万km、大阪まで延伸時は1時間に8本走行させ、1日の合計走行距離は74万kmになる予定です。